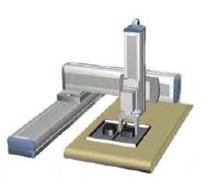
��ҵ��������һ�ֿ����������Ϳ���������ִ�й���������Զ�����еװ�������п��Զ����ơ��ٱ�̼����Ե��ص㡣�ڷ�������У���ҵ�������Զ����������Ѿ���Ϊ�Զ���װ����������δ���ķ�չ������ܶ�������ҵ������������ҵ�����̻�е��������úҵ��������ҵ�Ѿ�����װ����ҵ�������Զ��������ߣ�����֤��Ʒ�������������Ч�ʡ� ���⺸�Ӳ�Ʒ ��һ���ǵ㺸������ �㺸�����������ڵ㺸�Զ���ҵ�Ĺ�ҵ�����ˣ���ĩ�˳��յ���ҵ�����Ǻ�ǯ�� ʵ���ϣ���ҵ�������ں��������Ӧ�������Ǵ�����װ���������ϵĵ���㺸��ʼ�ġ�������㺸������ֻ������ǿ����ҵ��������ƴ�ӺõĹ��������Ӻ��㡣������Ϊ��֤ƴ�Ӿ��ȣ����û�������ɶ�λ����ҵ���㺸��������Ҫ���и�ȫ����ҵ���ܣ��㺸�û����˲���Ҫ���㹻�ĸ��������������ڵ����֮����λʱ�ٶ�Ҫ��ݣ�����Ҫƽ�ȣ���λҪȷ���Լ�����λ��ʱ�䣬��߹���Ч�ʡ�������˵���£���װ���С�������ռ�������С�ھ�Ķ�㶨λ����ÿ0.3~0.4s �ƶ� 30~50mm �ھ��λ���� ��λ���ȸߣ��� 0.25 mm ������ȷ������������ ���ش� 50~150 kg �����Ա�Я����װ��ѹ���ĺ�ǯ�� �ڴ�������ʾ�̼���ʡ��ʱ�� �㺸�ٶ����������ٶ���ƥ�䣬ͬʱ��ȫ�ɿ��Ժá� ������ҵ��ʹ�õĵ㺸������ �ڶ����ǻ��������� ���������������ڻ�������Ҫ���ۻ������屣�����ͷ��ۻ������屣�������Զ���ҵ�Ĺ�ҵ�����ˣ���ĩ�˳��յĹ����Ǻ�ǹ���������̱ȵ㺸����Ҫ���ӵö࣬�����������ھֲ������ۻ�����ȴ�������Σ�����켣�ᷢ���仯����ˣ����ӻ����˵�Ӧ�ò�����һ��ʼ�����ڵ绡����ҵ�����ǰ��溸�Ӵ������Ŀ��������ں��ӻ������е�Ӧ�ã�ʹ�����˻�����ҵ�ĺ���������������õ���Ч���.���ڻ������������������ҵ�еõ��ռ���ʹ�û�����������ͨ�û�е�������ṹ��������ҵ�еõ��㷺���á� �����������ڹ��� �������Ǽ��⺸�ӻ����� ���⺸�ӻ����������ڼ��⺸�Զ���ҵ�Ĺ�ҵ�����ˣ�ͨ���߾��ȹ�ҵ������ʵ�ָ������Եļ���ӹ���ҵ����ĩ�˳��յĹ����Ǽ���ӹ�ͷ�� ������С������������������С����Ӱ��������������ߺ��Ӳ�ƷƷ�ʵ�ͬʱ�������˺�����������ʱ�� �����⺸�ӳ�Ϊһ�ֳ�����Ӵ��ĺ��ӷ�ʽ�Ѿ����꣬���ߵ������ܶ�ʹ�ø��ټӹ��͵�����������Ϊ���ܡ�������˵绡����ȣ������˼��⺸�ĺ�����پ���Ҫ����ߡ���Ҫ�����£��߾��ȹ켣���� 0.1mm�������ش� 30~50 kg �����Ա�Я������ӹ�ͷ�����뼤�������и���ͨ�ţ���е�۸��Ժã�������Χ�߱����õ������ƺͿ����������ܡ� ���˹�ҵ������ ��1��������ʽ���˻����� ������ϵ��Ҫ�� X �ᡢ Y ��� Z ����ɡ�������ģ�黯�ṹ�������ݸ��ض�λ���ˣ�����ֱ������ϵ����̷����ݣ� �㷺������������ת�˼����������ϵȴ������������̡� ��2��������ʽ���˻����� ������ϵ��Ҫ�� X �ᡢ Y ��� Z ����ɡ���Ҳ���治ͬ��Ӧ�ò�ȡ��Ӧ�Ľṹ��ʽ ���㷺��������ʽ��������ʽ�������ض������ڲ��ͳ�ѹ���ȴ��������Զ������ϡ� ��3�������ʽ���˻����� ������ϵ��Ҫ�� X �ᡢ Y ��� Z ����ɡ���Ҳ���治ͬ��Ӧ�ò�ȡ��Ӧ�Ľṹ��ʽ����Ҫ������������࣬�絵���Զ���ȡ��ȫ�Զ����б������ȡϵͳ�ȡ� ��4�����ڱ�ʽ���˻����� ������ϵ��Ҫ�� X �ᡢ Y ��� Z ����ɡ� Z ����Ҫ��������Ҳ��Ϊ���ᡣ Y����ƶ���Ҫͨ����ӻ��죬 X ��ĩ�����ӿ����������� X ���ת����ʵ�� 4�������� �㷺Ӧ���ڹ������������ң��ǹؽ�ʽ�����˵��������Ʒ�����为�س̶�����ڹؽ�ʽ������С��
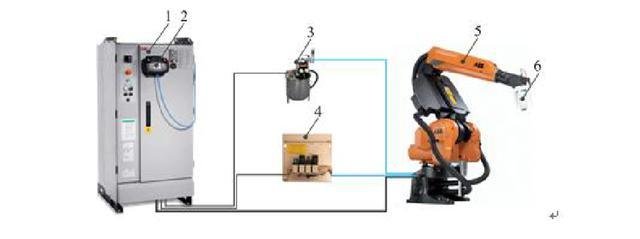
����ʽ���˻����� ��5���� �ؽ�ʽ���˻����� �ؽ�ʽ���˻������ǵ���ҵ��ҵ�г����Ļ���֮һ����ӵ�� 5~6 ���ᣬ��Ϊ�����������˵��ֱۣ����нṹ���ա�ռ�ؿռ�С����Թ����ռ�����ɶȸߵ��ص㣬�ʺ��ڼ����κι켣��ǶȵĹ����� �����Ͽ�֪�����˻�������һ������ϵͳ���Թؽ�ʽ���˻�����Ϊ�����乤��վ��Ҫ�� ������������ϵͳ������ϵͳ�����巢��װ������շ���װ�ú���צ�ȣ��Ͱ�ȫ����װ����ɡ��ṹ����ͼ��ʾ��
���˻�����ϵͳ��� ��������Ϊ�������� ����������ơ�ơ����ϲ�ҵ������ʵ������Զ��� ��˵õ��˹㷺��Ӧ�á��������˾�����ҵ��Ч������ȶ����ŵ㣬��Ź��˷��������Ͷ������ڸ�����ҵ�İ�װ�������з���ǿ�����á�����Ҫ�ŵ��кܶ�棬�����������Ч�ʣ���ŷ��������� �����Ըߡ���Ӧ��ǿ�ֲ�ͬ������� �����ƹ����Ͷ������������ж����к����� ����λȷ���ȶ��Ը� �Ⱥܶ��ŵ� ��
��ҵ������ ������������˻������ڱ���ṹ��û�й�������ͨ������Ϊ�������˱���ϰ��˻����˴���ʵ�����������������˶�Ϊ�����Ҷ������и������ˣ�������Ҫ���������غ�ƽ������ã��������˶�ܽ��к���������ƶ�����װ��������ĩ�ˣ��������������˽ṹ��Ϊ �ؽ�ʽ�������ˡ��ڱ�ʽ�������˺�����ʽ�������� ���Թؽ�ʽ����������˵���������Ϊ 4 �ᣬ���� 5 �� 6 ���������ˣ�����ʵ�ʰ�װ����������� 5 �� 6 ������������Խ��� �������Ҫ��������ĩ�˽��й�����4 �������������������ճ���⡣ ���Ĵ����ǹ�ҵͿװ������ Ϳװ��������Ϊһ�ֵ��͵�Ϳװ�Զ���װ����Ϳװ�������봫ͳ�Ļ�еͿװ��ȣ������ŵ������¼��������һ���ܹ���������Ϳ�ϵ������ʡ�����Ϳװ�����е� VOC ���к��ӷ����л���ŷ������ڶ��������������ǹ���˶��ٶȣ������������ģ�Ч���������ڴ�ͳ�Ļ�еͿװ�� ����������ǿ���ܹ���Ӧ�ڶ�Ʒ�֡�С������Ϳװ�����ܹ���ȷ��֤Ϳװ���յ�һ���ԣ���ýϸ�������Ϳװ��Ʒ ��Ϳװ�����˴�����ӹ������Բ�ȡ��ͨ�ù�ҵ���������Ƶ� 5 ��6���ɶȴ����ؽ�ʽ�����ˣ�����ĩ�˼�װ�Զ���ǹ�����������ͻ��֣�Ϳװ��������Ҫ�У���������Ϳװ�����˺ͷ���������Ϳװ�����ˡ�
����������Ϳװ������ ���������װ������� װ��������ǹ�ҵ����������װ���������϶����������װ���һ�ҵ�����ˡ���Ϊ�����Զ���װ��ĺ����豸���о��ȸߡ������ȶ����� ˳�Ժá�����Ѹ�ٵ��ŵ㡣װ��������ڲ�ͬװ���������Ϸ�����ǿ���װ�����ã�װ������˴���� 4-6 ����ɣ���Ŀǰ�г��ϳ�����װ������ˣ��Ա۲��˶���ʽ�� ֱ��ʽװ������˺ؽ�ʽװ������ˣ� �ؽ�ʽװ����������ˮƽ�����ؽ�ʽ����ֱ�����ؽ�ʽ�Ͳ����ؽ�ʽ��
����װ������� ˮƽ����ʽװ������� ���Ϊƽ��ؽ���װ������˻�SCARA�����ˣ���Ŀǰװ����������Ӧ����������һ��װ������ˡ������ھ�����װ������ˣ������ٶȿ졢���ȸߡ����Ժõ��ص㣬������Ϊ�����ŷ��������֤��ϸߵ��ظ���λ���ȣ��㷺�����ڵ��ӡ���е���Ṥҵ���йز�Ʒ��װ�䣬�ʺϹ������Ի��������� �����ǹ�ҵ���������ִ��������е�Ӧ�ã�����Ϊ������ЩӦ�ó��ϻ�ӭ���ۣ����ԣ�
����������վ���ռ��IJ��ֹ���������Դ�ڻ�������ת�ص�Ŀ�����ڴ��ݸ�����Ϣ�������������������������վ��ͬ��۵�Ͷ�����ʵ�Ը���Ҳ�������κ��������顣��վ������Ʒ������������Ͷ��ͷ������༭�����ϴ����Դ�����Ʒ��վ���ṩ����ƽ̨����Ϊ���Ȩ���������������վ��������Ƶ��ͼƬ���������漰��Ʒ��Ȩ���⣬���һʱ���֪�����ǽ��������ṩ��֤������ȷ�ϰ�Ȩ�������ұ�֧����������ɾ�����ݣ��Ա�֤����Ȩ�棡 ��Ȩ����
���ر�������������Ʒ����(�������ڵ���Ƶ��ͼƬ����Ƶ)Ϊ�û��ϴ�����������ƽ̨���ṩ��Ϣ�洢�ռ����
Notice: The content above (including the videos, pictures and audios if any) is uploaded and posted by the user , the platform merely provides information storage space services.��
|
 |��ϵ����|��������|�û�Э��|AMT��ѯ|�������|��Ա��פ|���ֳ�ֵ|�����̳�|���ֽ�������|TradExȫ��|����QQ����Ⱥ|������ҵ��|�����ż���Ⱥ|����Ͷ��|�ֻ���|
�����Ƚ����켼����̳™�����AMT™�� ����֪��™��
( ��ICP��12020441��-3 )
|��ϵ����|��������|�û�Э��|AMT��ѯ|�������|��Ա��פ|���ֳ�ֵ|�����̳�|���ֽ�������|TradExȫ��|����QQ����Ⱥ|������ҵ��|�����ż���Ⱥ|����Ͷ��|�ֻ���|
�����Ƚ����켼����̳™�����AMT™�� ����֪��™��
( ��ICP��12020441��-3 )
GMT+8, 2025-12-18 12:17 , Processed in 0.283138 second(s), 35 queries .
��̳������ �����Ƚ����켼����̳������֪���� ������������̳�������ϸ����ء��л��������簲ȫ��������������Ϣ���������ȹ�����ط��ɷ��棬�����Ƿ����ۡ��Ƿ�������Ϣ����л������
����̳���۴��������߸�������һ�Ա�����е��������ݵķ������Σ��뱾��̳�����أ���Ա���뱾��̳���۱��������л��������ɷ��棬���漰�������ۡ�ɫ�顢��Ʒ��Υ��ǹ֧���۵���Ϣһ��ɾ��������������Ϻ�Э���й�ִ�����صĵ��飬�����л�Աע�⣡
����̳��Դ�ɻ�Ա�ڱ���̳��������Ȩ����ԭ���ߣ���̳������ԴΪ��Ա����ѧϰʹ�ã������漰��ҵ��;���������غ�24Сʱɾ���������ַ�ԭ���ߵİ�Ȩ��֪ʶ��Ȩ�������Ÿ�֪�����ǽ��������������ͻظ���лл������
������ϵ: ˫��QQ�ͷ���3419347041 ����QQ�ͷ�:3500763653 �绰021-37709287 ��������Ͷ�ߣ�QQ:2969954637 ����:info@amtbbs.org �Ź��ں�:AMTBBS










{kind=link}